Spiking Insect Vision
This work is carried out in collaboration with Martin Egelhaaf and Olivier Bertrand, Department of Neurobiology, Bielefeld University .
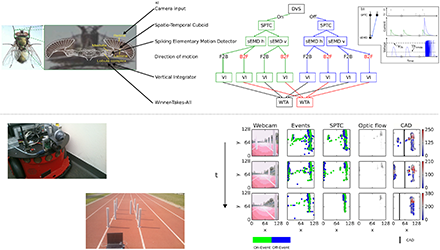
Motion cues are crucial for flying insect to navigate through their environment without colliding with obstacles in close proximity [1]. During constant translational ego-motion the apparent motion on the retina, or so-called optic flow, scales with the distance. Hence, it can be used to extract a collision-free path [2].
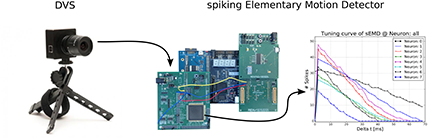
On the other hand optic flow can be used by robotic agents to interact with the world. This project aims to translate the principle motion estimation in insects onto state-of-the-art neuromorphic VLSI chips, processing events provided by a neuromorphic vision sensor (Dynamic Vision Sensor [3]).
The classical model of motion estimation in insects is based on the correlation-type Elementary Motion Detector [4], which correlates pixel intensities of two adjacent pixels, where one pixel value is passed through a temporal low-pass filter. In contrast, the DVS only emits binary events (On-/Off-event) in the presence of a relative temporal contrast change. To be able to extract relative motion from the stream of events, which is inherently asynchronous, in wide dynamic range of velocities we developed the spiking Elementary Motion Detector (sEMD). The sEMD is characterize by (I) direction selective response and (II) non-linear multiplicative scaling of its input based on the interspike interval of two adjacent pixels of the DVS. Thus, temporal coincidence of two incoming events is expressed in the neuron's instantaneous firing frequency.
After successful verification in software simulation, we used the sEMD circuit in a large-scale open-loop simulation to predict a collision free steering direction for a robotic agent [5, 6] and later abstracted the principal further to implemented 8 sEMD neurons on a neuromorphic testchip. Since excitatory synapses emit an Excitatory Post Synaptic Current (EPSC), we can exploit the temporal decay of the EPSC to scale the gain of a second synapse. In other words, the gain will be maximal if two events occur at the same time point and zero if the time between the two spikes is longer than the synaptic time constant. This mechanism directly establishs the aforementioned direction selectivity and the multiplicative scaling. The adaptive gain mechanism scales the temporal extend of a burst, as well as the total number spikes within a burst of activity according to the interspike interval.
This event-based optic flow extraction can be used to avoid collisions, but also has the potential to be used as source for extraction navigation information, e.g. homing direction.
[1] Egelhaaf, Martin, Roland Kern, and Jens Peter Lindemann. "Motion as a source of environmental information: a fresh view on biological motion computation by insect brains." (2014).
[2] Bertrand, Olivier JN, Jens P. Lindemann, and Martin Egelhaaf. "A bio-inspired collision avoidance model based on spatial information derived from motion detectors leads to common routes." PLoS Comput Biol 11.11 (2015): e1004339.
[3] Lichtsteiner, Patrick, Christoph Posch, and Tobi Delbruck. "A 128x128 120 dB 15us Latency Asynchronous Temporal Contrast Vision Sensor." IEEE journal of solid-state circuits 43.2 (2008): 566-576.
[4] Hassenstein, Bernhard, and Werner Reichardt. "Systemtheoretische Analyse der Zeit-, Reihenfolgen- und Vorzeichenauswertung bei der Bewegungsperzeption des Rüsselkäfers Chlorophanus." Zeitschrift für Naturforschung B 11.9-10 (1956): 513-524.
[5] Milde, Moritz B., et al. "Bioinspired event-driven collision avoidance algorithm based on optic flow." Event-based Control, Communication, and Signal Processing (EBCCSP), 2015 International Conference on. IEEE, 2015.
[6] Milde, Moritz B.. “Biomimetic asynchronous event-driven collision avoidance spiking neural network based on optic flow,” M.S. thesis, Faculty of Biology, Neurobiology, Bielefeld Univ., Bielefeld, Germany, 2015.
| Last modified: | 19 September 2020 5.32 p.m. |